|
Linqi Ye (叶林奇) | THU-SHU Joint Lab of RoboArt & Embodied IntelligenceOur goal——to make the most artistic machine in the technological field; to create the most technologically advanced works in the art field. |
|
This is a joint lab of Shanghai University and Tsinghua University, focusing on robotics, embodied intelligence, and their combination with fine art. I am an associate professor at the School of Future Technology (Institute of Artificial Intelligence), Shanghai University. From 2019 to 2022, I was a Postdoc at Tsinghua University. From 2017 to 2018, I was a Visiting Scientist at Cornell University (advisor: Andy Ruina). From 2016 to 2017, I was a Visiting Scholar at the State University of New York at Buffalo (advisor: John L. Crassidis). I received my B.S. and Ph.D. degrees from Tianjin University in Control Science and Engineering in 2014 and 2019, respectively. Contact me: yelinqi@shu.edu.cn |
Publications
— 2026 —
 |
Heuristically Motivating Large Language Models for Task Planning Chao Wang, Longhui Cao, Juntong Qi, Linqi Ye Knowledge-Based Systems, 2026 [PDF] |
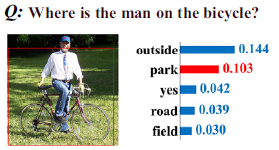 |
Focal equilibrium: Bias reshaping for generalizable and robust visual understanding Chao Wang, Weiwei Fu, Haoyang Li, Linqi Ye, Yang Zhou Information Sciences, 2026 [PDF] |
— 2025 —
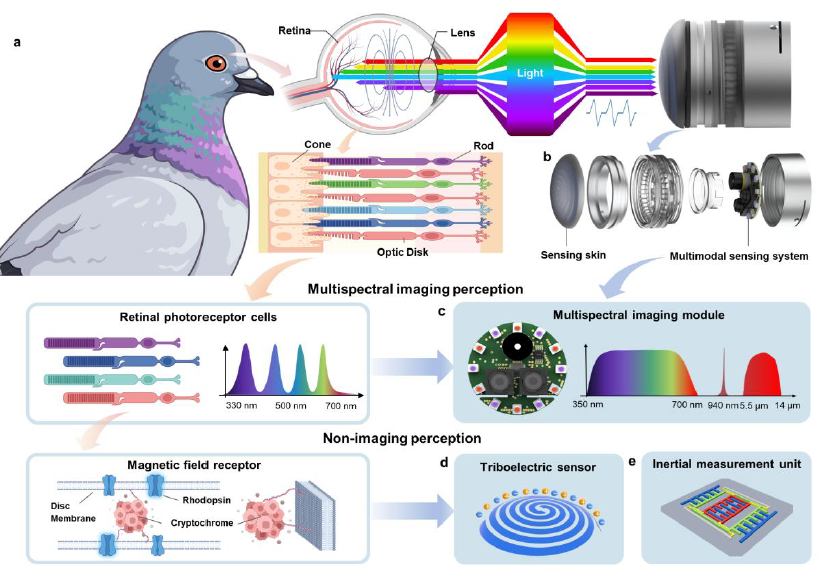 |
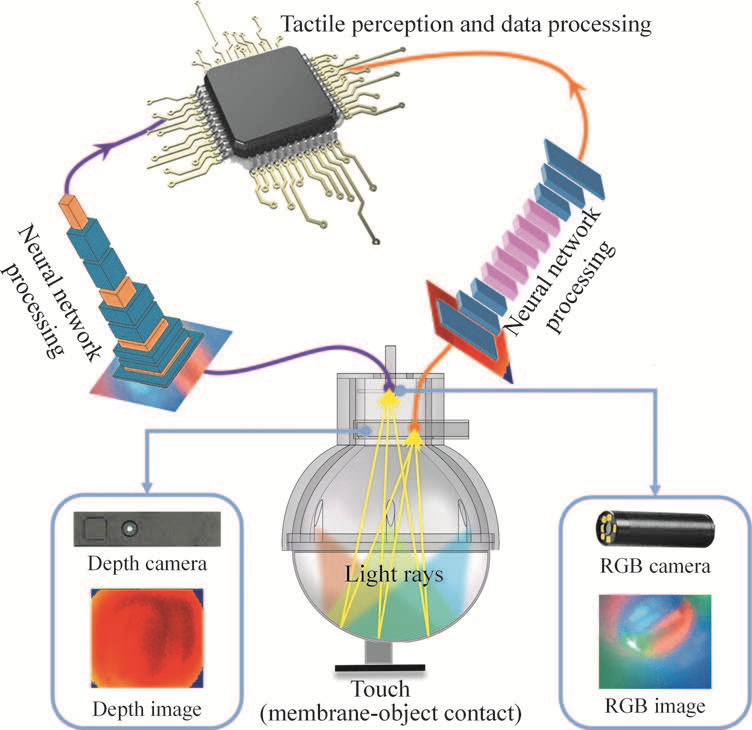
Biomimetic Multimodal Tactile Sensing Enables Human-like Robotic Perception Shoujie Li, Tong Wu, Jianle Xu, Yan Huang, Zongwen Zhang, Hongfa Zhao, Qinghao Xu, Zihan Wang, Linqi Ye, Yang Yang, Chuqiao Lyu, Shilong Mu, Xueqian Wang , Zhaoqian Xie, Changsheng Wu, Wenbo Ding Nature Sensors, 2025 [video][PDF] |
 |
Gewu Playground: An Open-Source Robot Simulation Platform for Embodied Intelligence Research Linqi Ye, Boyang Xing, Bin Liang, Lei Jiang, Yan Peng Science China: Technological Sciences, 2025 [video][PDF][code][CCTV2][CCTV4][CCTV13] |
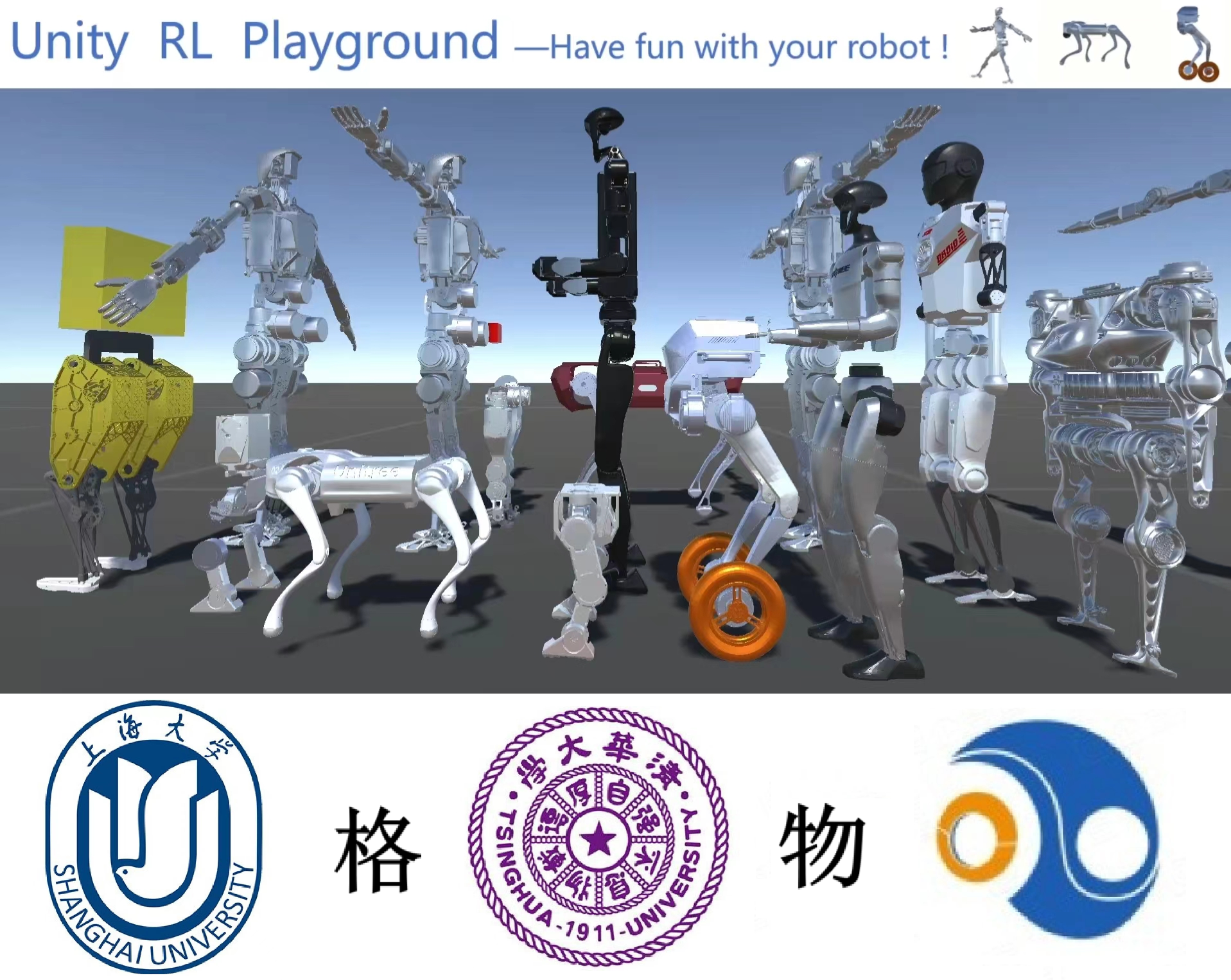 |
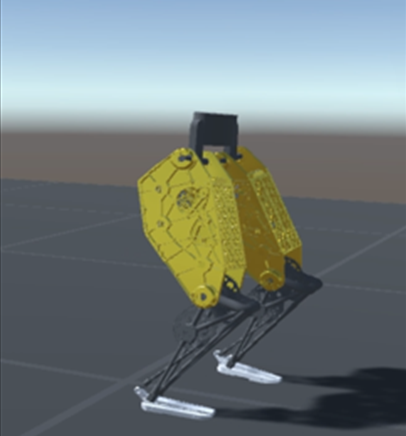
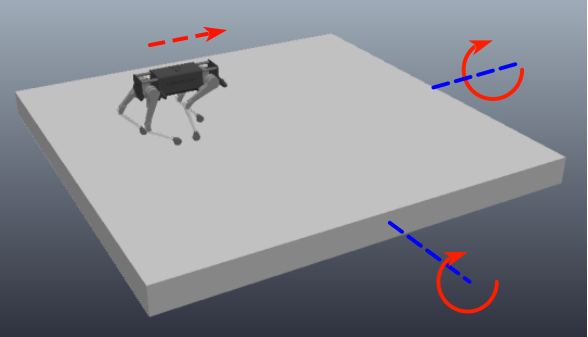
Unity RL Playground: A Versatile Reinforcement Learning Framework for Mobile Robots Linqi Ye, Rankun Li, Xiaowen Hu, Jiayi Li, Boyang Xing, Yan Peng, Bin Liang Robio, 2025 [video][PDF] |
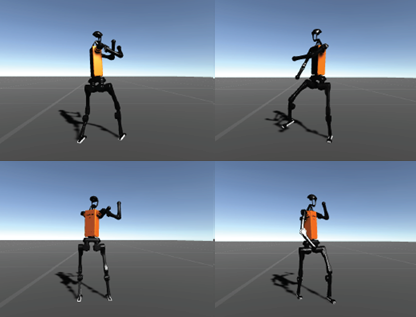 |
Learning Whole-body Motion Control through Instruction Learning and Human Motion Data Zhipeng Xu, Kaixuan Chen, Linqi Ye, Boyang Xing ICIRA, 2025 [video][PDF] |
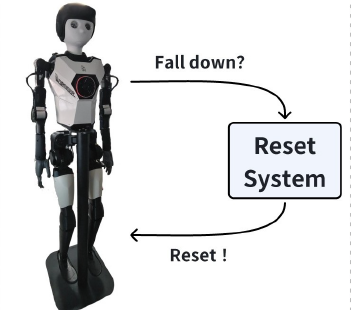 |
From Sim-to-Real to Learn-in-Real: Real-world Online Learning for Humanoid Robots Rankun Li, Yuhang Xie, Linqing Zhu, Linqi Ye, Qingdu Li, Yan Peng ICIRA, 2025 [PDF] |
 |
Transformer-Based World Interaction Modeling for Humanoid Locomotion Control Han Zheng, Yi Cheng, Hang Liu, Jiayi Li, Yizhe Li, Linqi Ye, Houde Liu CASE, 2025 [video][PDF] |
— 2024 —
 |
Second Place in Humanoid Robot 40m Racing Wencong Gan, Linqi Ye, Qingdu Li, Rankun Li, Xiaowen Hu, Yuhang Xie Zhongguancun Biomimetic Robot Competition, 2024 [video1][video2][Prize] |
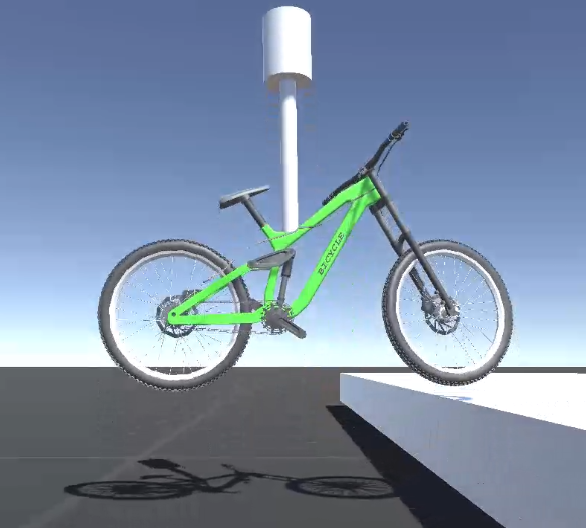 |
Dynamic Jumps of an Agile Bicycle through Reinforcement Learning Zhuochen Yuan, Linqi Ye, Houde Liu, Zhang Chen, Bin Liang ONCON, 2024 [video][PDF] |
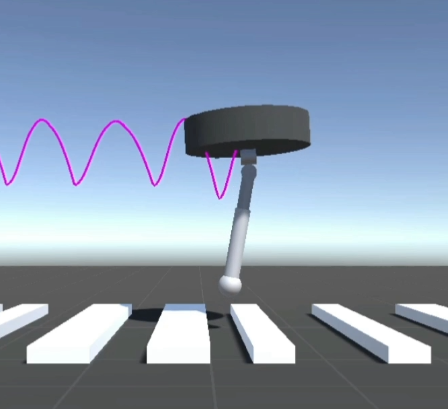 |
Hopping Control of a Monopod Robot: Reinforcement Learning vs Raibert Heuristic Zhuochen Yuan, Linqi Ye, Houde Liu, Bin Liang ICRMV, 2024 [video][PDF] |
 |
First Prize in Reinforcement Learning for Humanoid Robot Simulation Han Zheng, Yi Cheng, Hui Zhang, Houde Liu, Linqi Ye Humanoid Robot Innovation Challenge, China Robotics and Artificial Intelligence Competition (CRAIC), 2024 [video1][video2][video3][video4][video5][video6][video7][Prize][Score] |
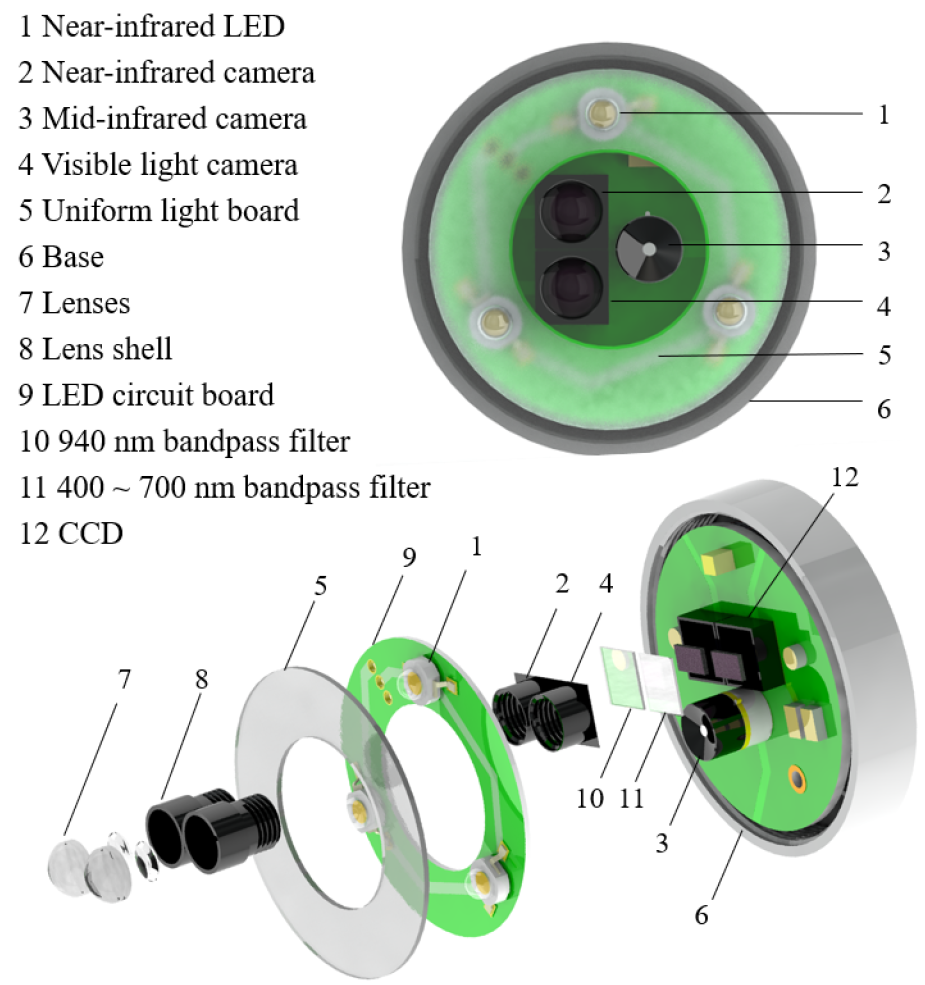 |
M3Tac: A Multispectral Multimodal Visuotactile Sensor with Beyond-Human Sensory Capabilities Shoujie Li, Haixin Yu, Guoping Pan, Huaze Tang, Jiawei Zhang, Linqi Ye, Xiao-Ping Zhang, Wenbo Ding IEEE Transactions on Robotics, 2024 [video][PDF][web] |
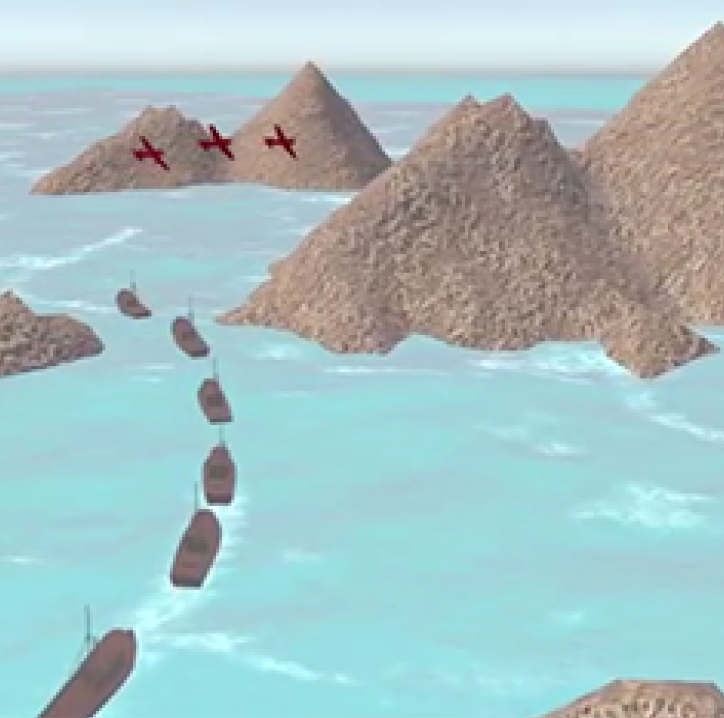 |
Cooperative Formation Control of USVs and UAVs Based on Reinforcement Learning Ting Wu, Linqi Ye, Xianglong Li, Yan Peng ARCAI, 2024 [video][PDF] |
 |
Multi-Brain Collaborative Control for Quadruped Robots Hang Liu, Yi Cheng, Rankun Li, Xiaowen Hu, Linqi Ye, Houde Liu CoRL, 2024 [video][PDF][Appendix][web] |
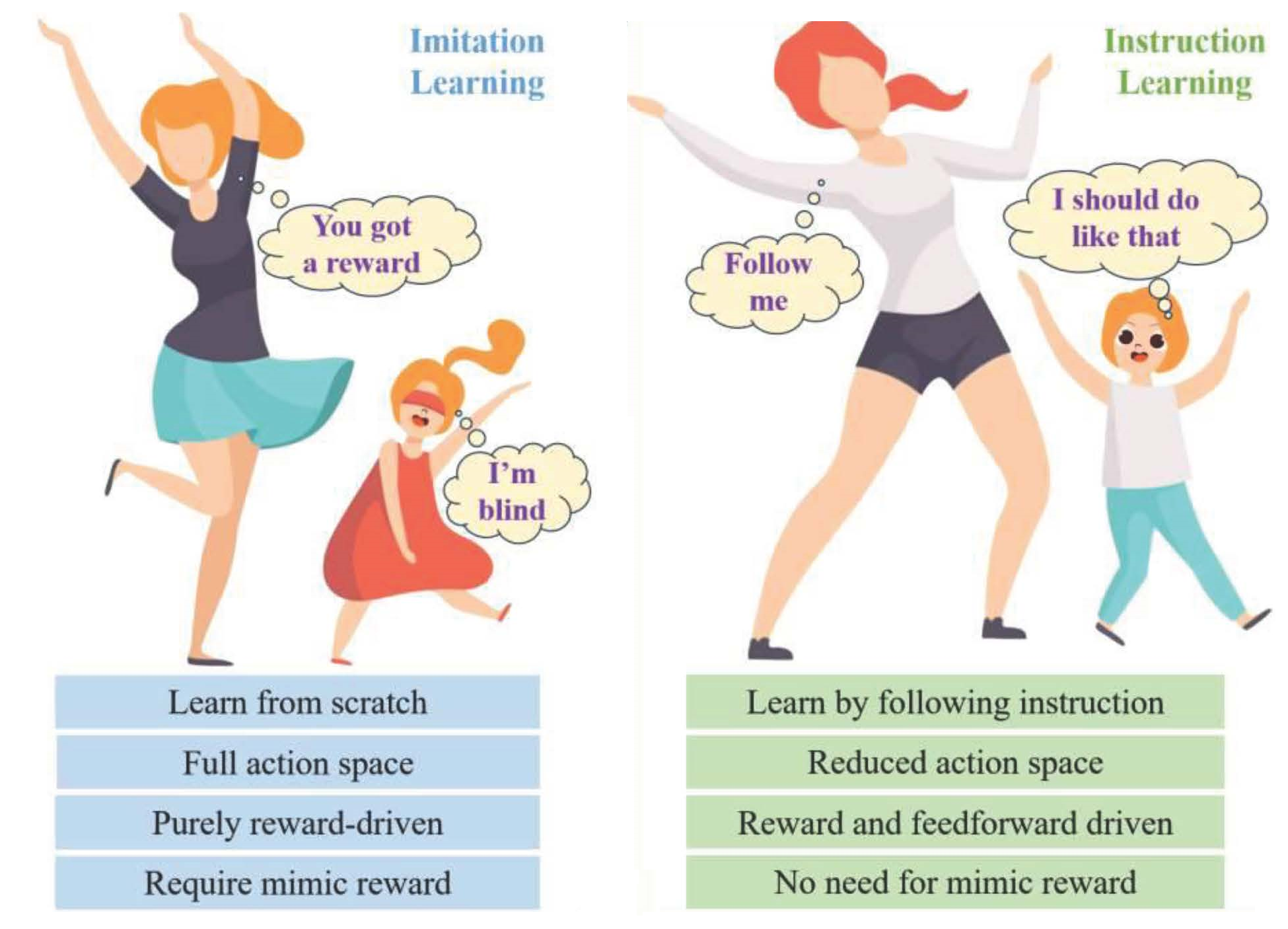 |
From Imitation Learning to Instruction Learning: A New Paradigm for Efficient Motion Learning Linqi Ye, Jiayi Li, Yi Cheng, Xianglong Li, Houde Liu, Bin Liang ICRA, 2024, late breaking results [video][PDF] |
 |
The Fourth Placement in Quadruped Locomotion via Reinforcement Learning (Tele-operation Group) Houde Liu, Linqi Ye, Yi Cheng, Guoping Pan, Hang Liu, Xueqian Wang, Yuheng Min, Chenxi Han, Han Zheng, Jiayi Li ICRA Quadruped Robot Challenge (QRC), 2024 [video1][video2][video3][video4][Prize] |
 |
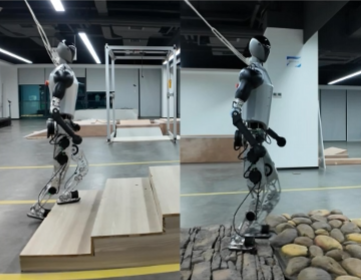
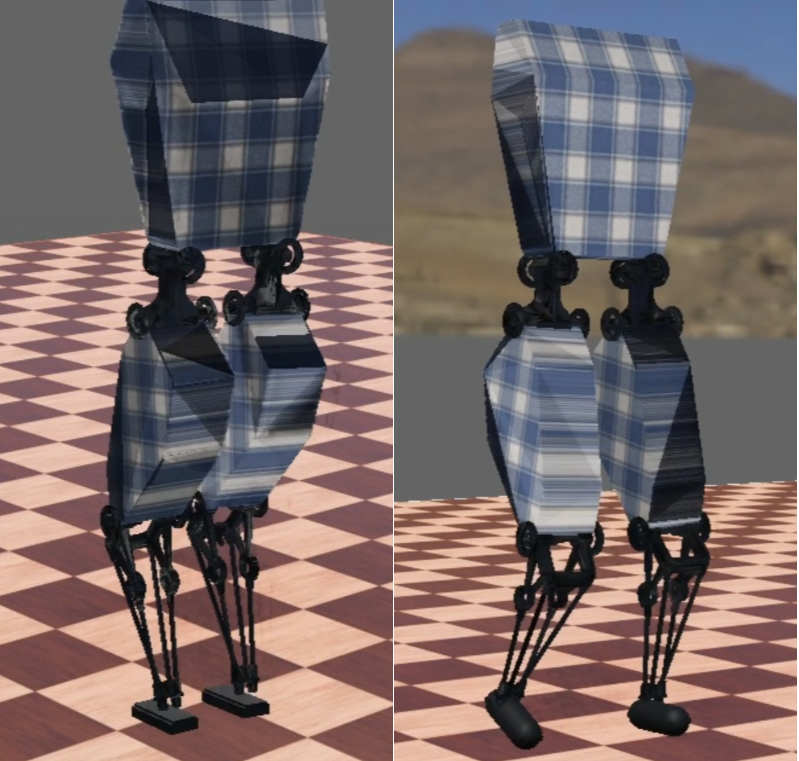
Agile and Versatile Bipedal Robot Tracking Control through Reinforcement Learning Jiayi Li, Linqi Ye, Yi Cheng, Houde Liu, Bin Liang arXiv, 2024 [video][PDF] |
 |
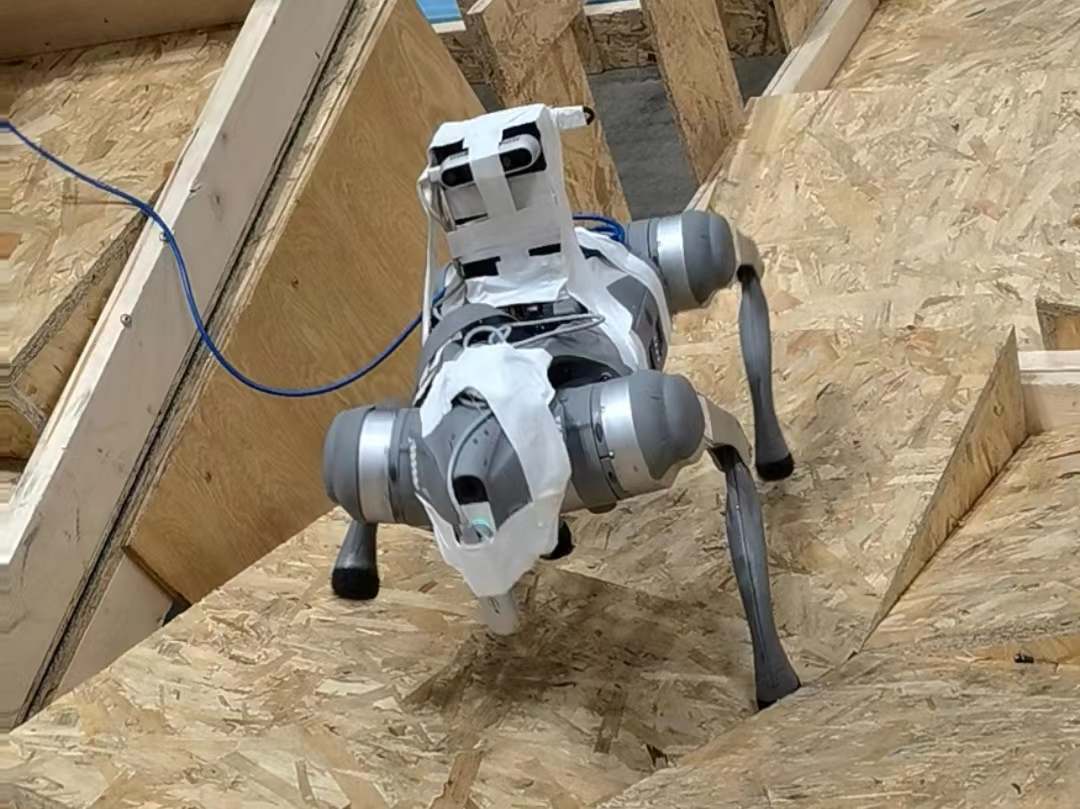
Quadruped Robot Traversing 3D Complex Environments with Limited Perception Yi Cheng, Hang Liu, Guoping Pan, Linqi Ye, Houde Liu, Bin Liang IROS, 2024 [video][PDF][web] |
 |
Structural Optimization of Lightweight Bipedal Robot via SERL Yi Cheng, Chenxi Han, Yuheng Min, Linqi Ye, Houde Liu, Hang Liu, Bin Liang IROS, 2024 [video][PDF][web] |
{kind=link}
— 2023 —
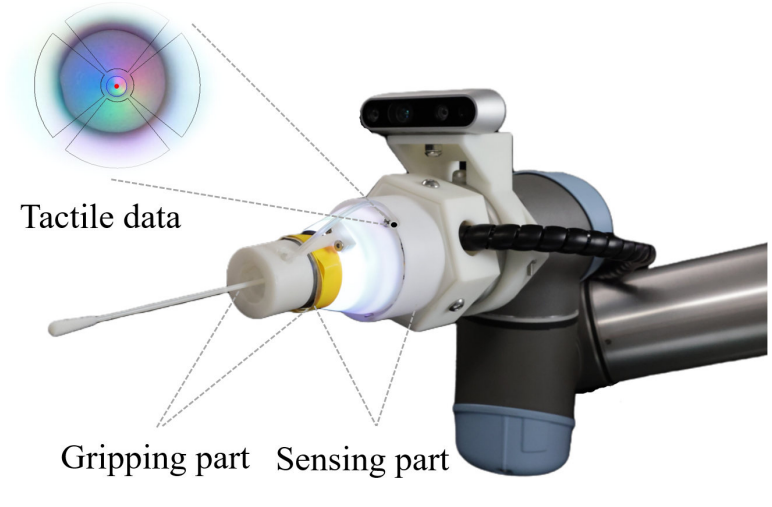 |
Visuo-Tactile Sensor Enabled Pneumatic Device Towards Compliant Oropharyngeal Swab Sampling Shoujie Li, Mingshan He, Wenbo Ding, Linqi Ye, Xueqian Wang, Junbo Tan, Jinqiu Yuan, Xiao-Ping Zhang IROS, 2023 [video][PDF][web][IROS Best Application Paper Award Finalist] |
 |
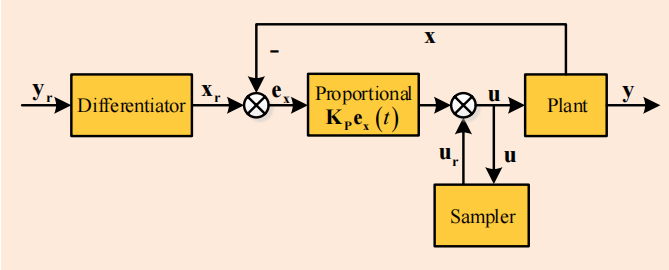
Extended PID Controller for Nonminimum Phase Systems with Application to a Hypersonic Vehicle Linqi Ye, Xueqian Wang, Bin Liang IECON, 2023 [video][PDF] |
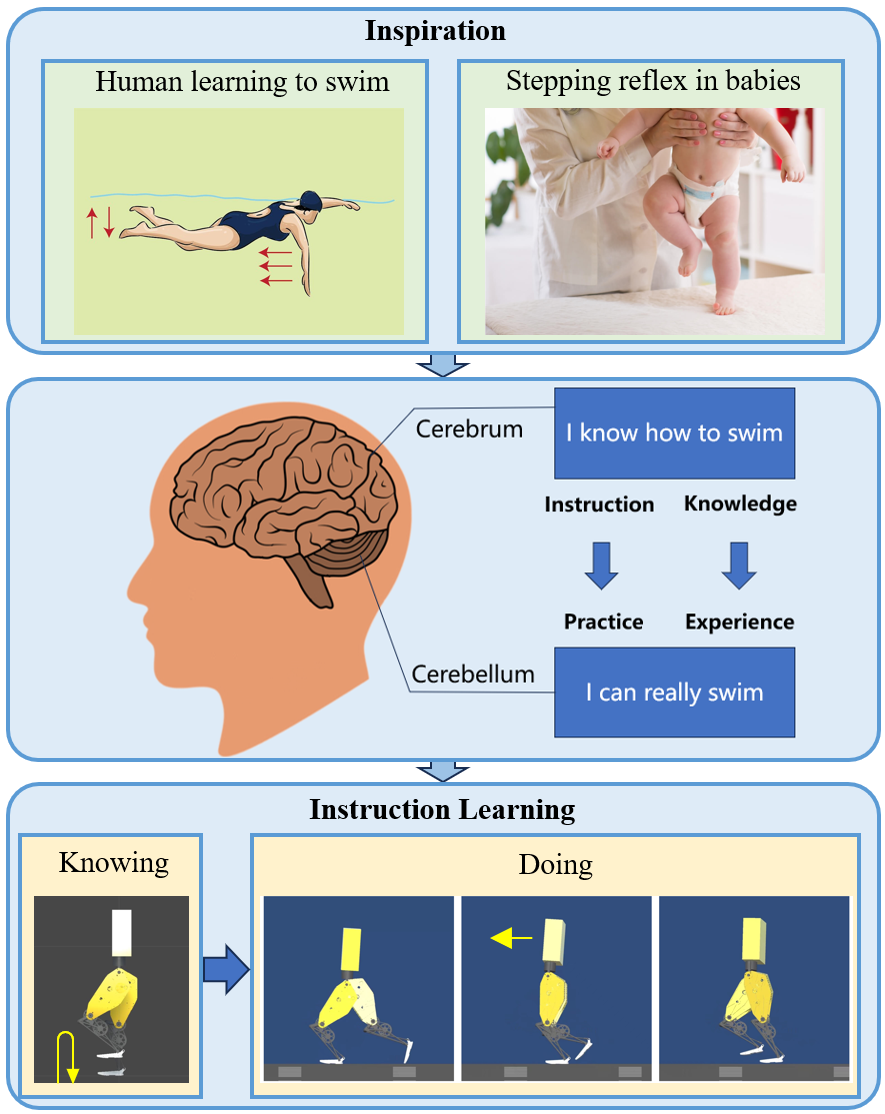 |
From Knowing to Doing: Learning Diverse Motor Skills through Instruction Learning Linqi Ye, Jiayi Li, Yi Cheng, Xianhao Wang, Bin Liang, Yan Peng arXiv, 2023 (accepted by Biomimetic Intelligence and Robotics) [video] [PDF] |
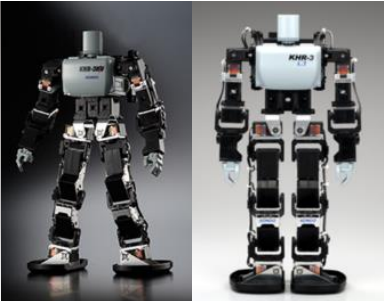 |
Feedforward Enhanced Reinforcement Learning Control for a Small Humanoid Robot KHR-3HV Yucheng Xin, Linqi Ye, Xueqian Wang Robio, 2023 [video][PDF] |
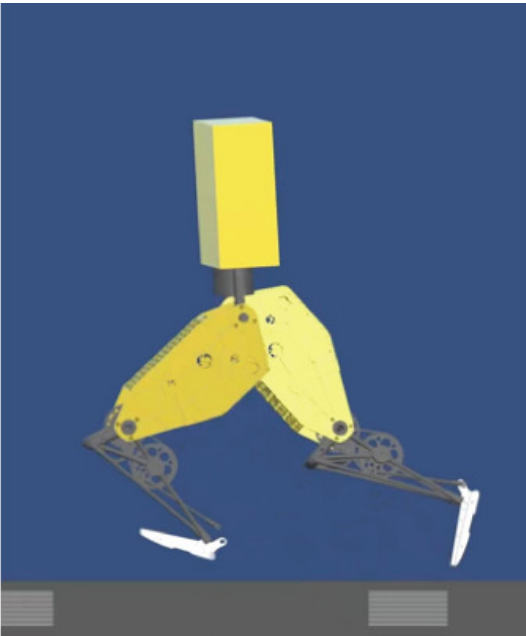 |
Realizing Human-like Walking and Running with Feedforward Enhanced Reinforcement Learning Linqi Ye, Xueqian Wang, Bin Liang ICIRA, 2023 [video] [PDF] |
 |
Recovery from Injury-Learning Bipedal Jumping Skills with a Motor Output Torque Limit Curriculum Jiayi Li, Linqi Ye, Yujie Sun, Houde Liu, Bin Liang ICIRA, 2023 [video][PDF] |
 |
JamTac: A Tactile Jamming Gripper for Searching and Grasping in Low-Visibility Environments Shoujie Li, Linqi Ye, Haixin Yu, Xianghui Yin, Chongkun Xia, Wenbo Ding, Xueqian Wang, Bin Liang Soft Robotics, 2023 [video][PDF][data] |
|
Visual–Tactile Fusion for Transparent Object Grasping in Complex Backgrounds Shoujie Li, Haixin Yu, Wenbo Ding, Houde Liu, Linqi Ye, Chongkun Xia, Xueqian Wang, Xiao-Ping Zhang IEEE Transactions on Robotics, 2023 [video1][video2][PDF][web] |
|
 |
Bipedal Walking Control by Using Acceleration Factor Linqi Ye, Xueqian Wang, Houde Liu, Bin Liang, Bo Yuan Nonlinear Dynamics, 2023 [video1][video2][video3] [PDF] |
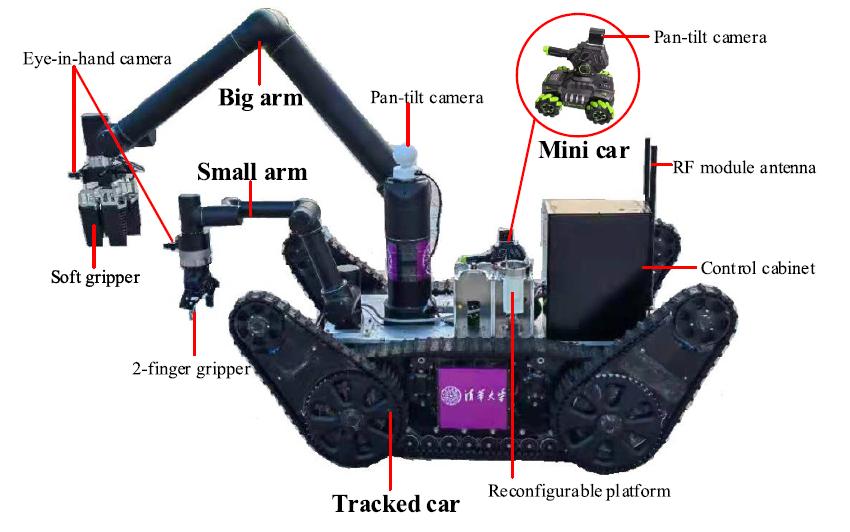 |
HeterBot: A heterogeneous mobile manipulation robot for versatile operation Linqi Ye, Jiatai Guo, Jiayi Li, Houde Liu, Xueqian Wang, Bin Liang IET Cyber‐Systems and Robotics, 2023 [video][full video] [PDF] |
{kind=link}
— 2022 —
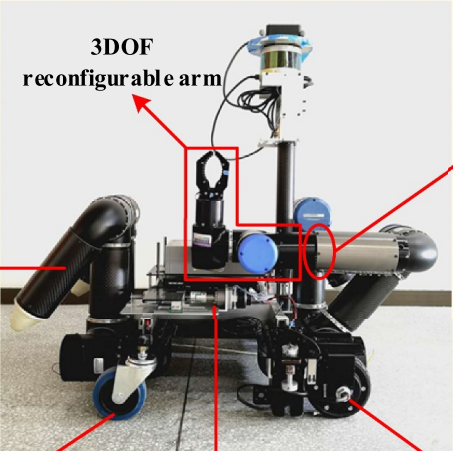 |
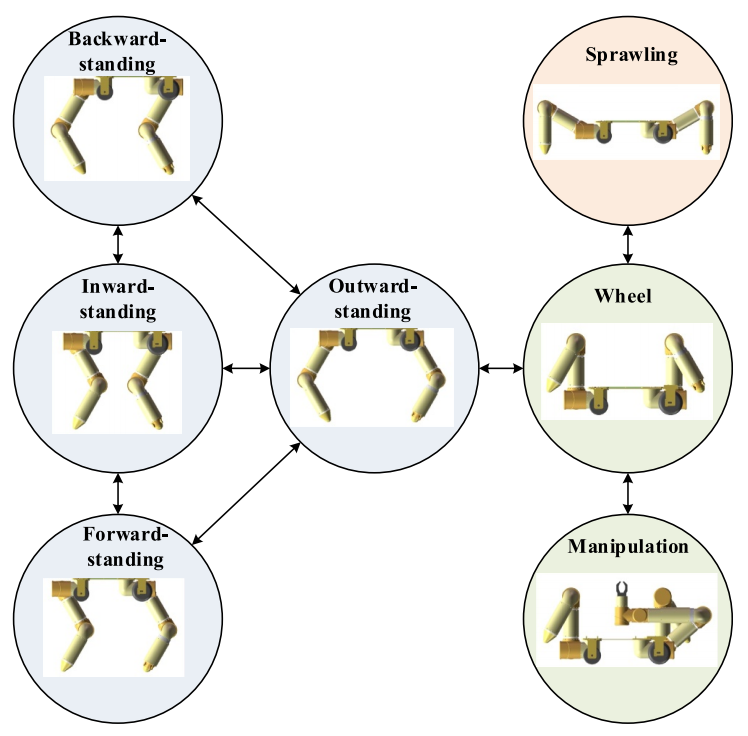
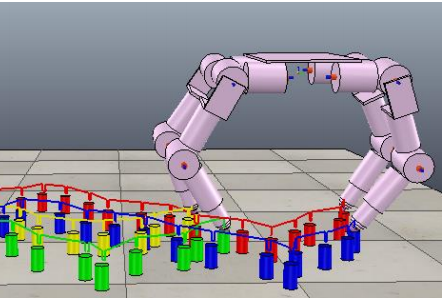
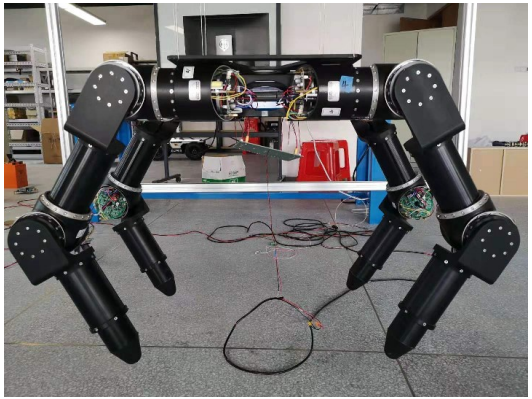
Design and control of a robotic system with legs, wheels, and a reconfigurable arm Linqi Ye, Houde Liu, Xueqian Wang, Bin Liang, Bo Yuan IET Cyber‐Systems and Robotics, 2022 [video] [PDF] |
 |
The Simplest Balance Controller for Dynamic Walking Linqi Ye, Xueqian Wang, Houde Liu, Bin Liang ROBIO, 2022 [video] [PDF] |
 |
TaTa: A Universal Jamming Gripper with High-Quality Tactile Perception and Its Application to Underwater Manipulation Shoujie Li, Xianghui Yin, Chongkun Xia, Linqi Ye, Xueqian Wang, Bin Liang ICRA, 2022 [video][PDF][ICRA 2022 Outstanding Mechanisms and Design Paper Award Finalist] |
 |
Ant3DBot A Modular Self-reconfigurable Robot with Multiple Configurations Sen Niu, Linqi Ye, Houde Liu, Bin Liang, Zongxiang Jin ICIRA, 2022 [video] [PDF] |
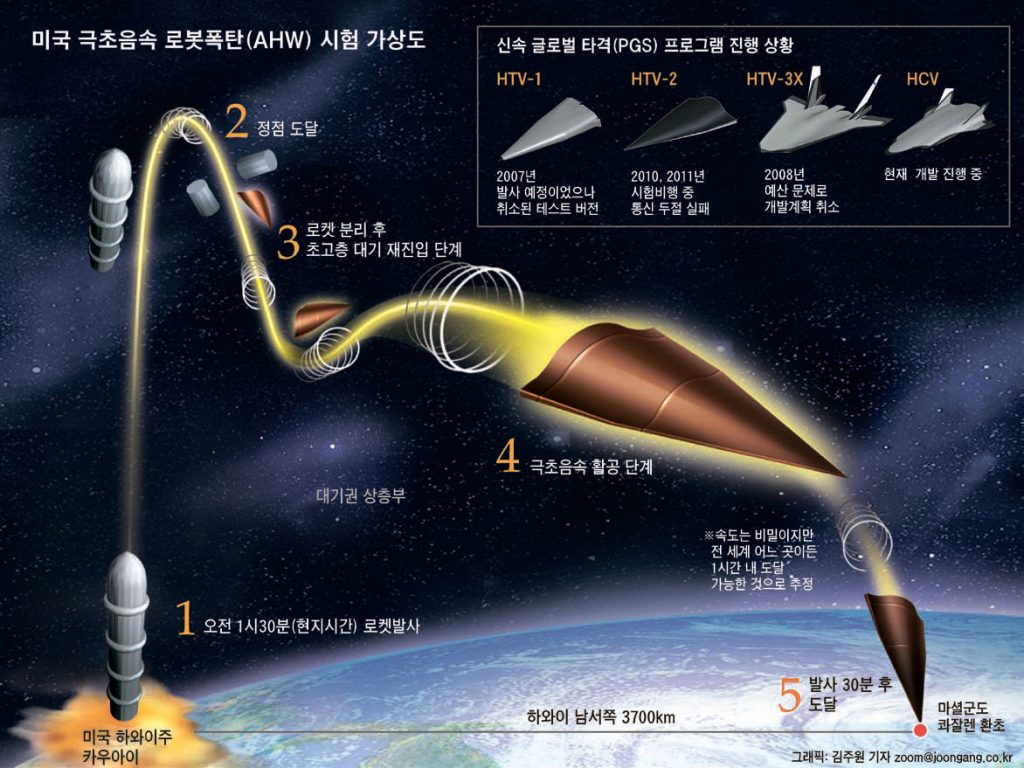 |
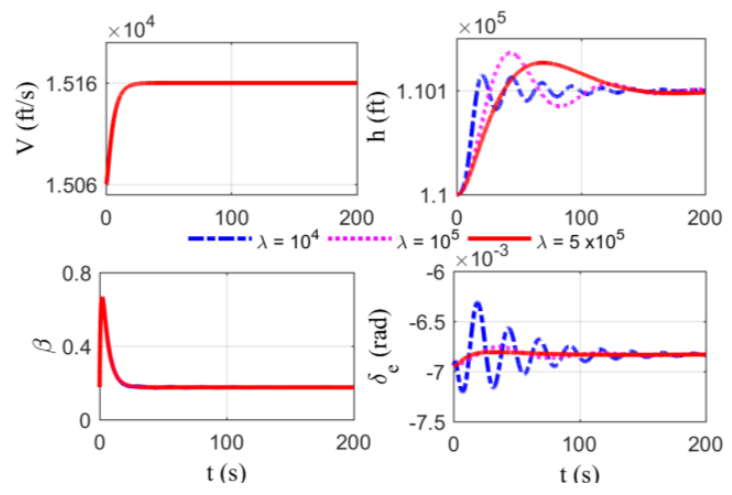
Anti-Windup Robust Backstepping Control for an Underactuated Reusable Launch Vehicle Linqi Ye, Bailing Tian, Houde Liu, Qun Zong, Bin Liang, Bo Yuan IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022 [PDF] |
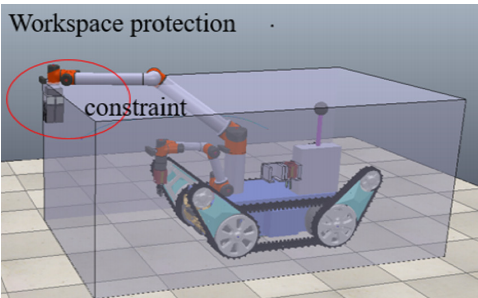 |
Safety-Oriented Teleoperation of a Dual-Arm Mobile Manipulation Robot Jiatai Guo, Linqi Ye, Houde Liu, Xueqian Wang, Lunfei Liang, Bin Liang ICIRA, 2022 [video][PDF] |
 |
Quasi-static Walking for Biped Robots with a Sinusoidal Gait Shuangfei Wu, Changliang Wang, Linqi Ye, Xueqian Wang, Houde Liu, Bin Liang CASE, 2022 [video][PDF] |
 |
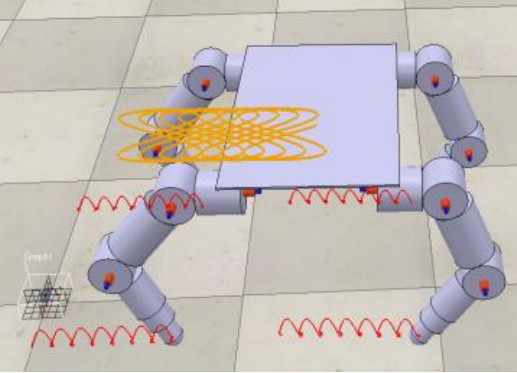
Posture Stabilization Control for a Quadruped Robot Walking on Swaying Platforms Jiayi Li, Linqi Ye, Zongxiang Jin, Houde Liu, Bin Liang CASE, 2022 [video][PDF] |
 |
Effect of Foot Shape on Walking Performance of a Biped Robot Controlled by State Machine Zhihao Zhou, Linqi Ye, Houde Liu, Bin Liang ICIRA, 2022 [video][PDF] |
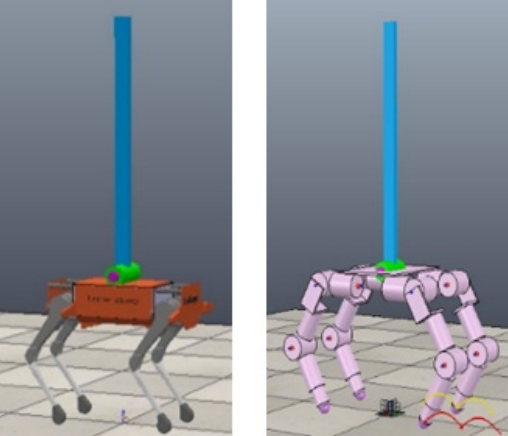 |
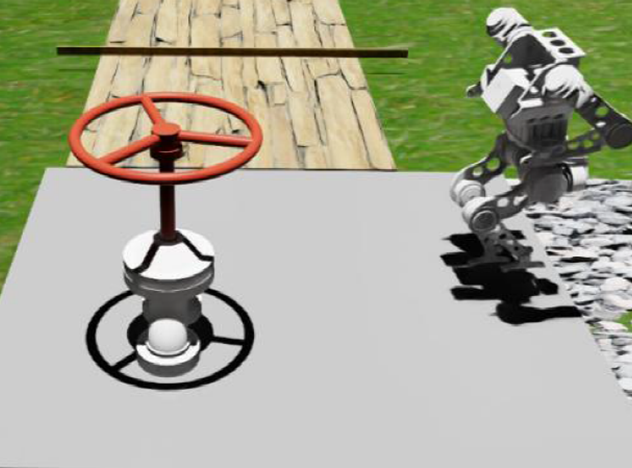
Balance Control of an Inverted Pendulum on a Quadruped Robot by Reinforcement Learning Shangyu Wu, Xianqing Lei, Linqi Ye Journal of Physics: Conference Series, 2022 [video][PDF] |
— 2021 —
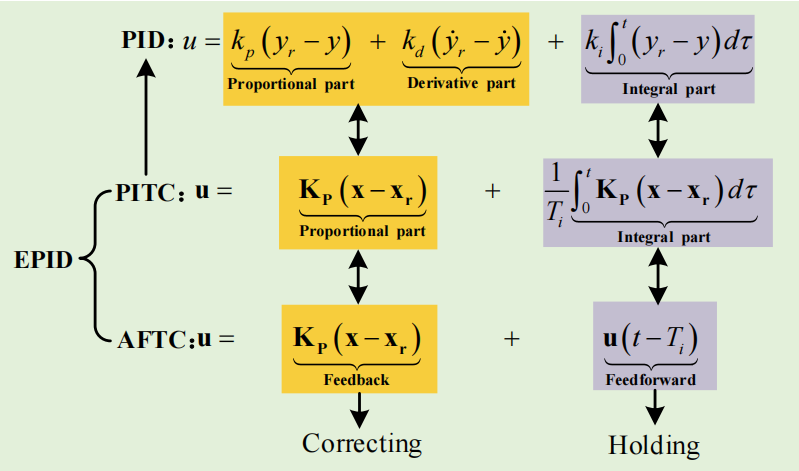 |
An Extended PID Control Framework Linqi Ye, Bin Liang, Xueqian Wang CCTA, 2021 [video] [PDF] |
 |
Output Tracking of Uncertain Nonminimum Phase Systems by Experience Replay Linqi Ye, Qun Zong, Bailing Tian IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021 [PDF] |
 |
Universal Tracking Controller with Disturbance Rejection Linqi Ye SMC, 2021 [video] [PDF] |
 |
Symmetry in Biped Walking Linqi Ye, Xueqian Wang, Houde Liu, Bin Liang SMC, 2021 [video] [PDF] |
 |
Smooth Static Walking for Quadruped Robots based on the Lemniscate of Gerono Xiaolong Ma, Linqi Ye, Houde Liu, Xueqian Wang, Bin Liang CASE, 2021 [video][PDF] |
 |
Reinforcement Learning Tracking Control for Unknown Continuous Dynamic Systems Linqi Ye, Jiayi Li, Changliang Wang, Houde Liu, Bin Liang DDCLS, 2021 [PDF] |
 |
Optimized Static Gait for Quadruped Robots Walking on Stairs Linqi Ye, Yaqi Wang, Xueqian Wang, Houde Liu, Bin Liang CASE, 2021 [video][PDF] |
 |
Optimal Bounded Inversion for Nonminimum Phase Nonhyperbolic Systems Linqi Ye, Yaqi Wang, Deshan Meng,Xueqian Wang, Bin Liang SMC, 2021 [PDF] |
 |
Design of a Tactile Sensing Robotic Gripper and Its Grasping Method Shoujie Li, Linqi Ye, Chongkun Xia, Xueqian Wang, Bin Liang SMC, 2021 [PDF] |
 |
Control of an Underactuated Reusable Launch Vehicle by Partial Feedback Linearization Linqi Ye, Jiayi Li, Changliang Wang, Houde Liu, Bin Liang CCC, 2021 [PDF] |
— 2020 —
 |
Multi-task Control for a Quadruped Robot with Changeable Leg Configuration Linqi Ye, Houde Liu, Xueqian Wang, Bin Liang, Bo Yuan IROS, 2020 [video] [PDF] |
 |
A Static Gait Generation for Quadruped Robots with Optimized Walking Speed Yaqi Wang, Linqi Ye, Xueqian Wang, Nong Cheng, Houde Liu, Bin Liang SMC, 2020 [PDF] |
— 2019 —
 |
Task-oriented Hierarchical Control for a Quadruped Robot Linqi Ye, Houde Liu, Xueqian Wang, Bo Yuan, Bin Liang ROBIO, 2019 [video][PDF] |
 |
Impacts of Metarhizium brunneum F52 infection on the flight performance of Asian longhorned beetles, Anoplophora glabripennis Eric H. Clifton, Jason Cortell, Linqi Ye, Thomas Rachman, Ann E. Hajek PLOS ONE, 2019 [video][PDF] |
— 2018 —
 |
Output-Redefinition-Based Dynamic Inversion Control for a Nonminimum Phase Hypersonic Vehicle Linqi Ye, Qun Zong, John L. Crassidis, Bailing Tian IEEE Transactions on Industrial Electronics, 2018 [PDF] |
 |
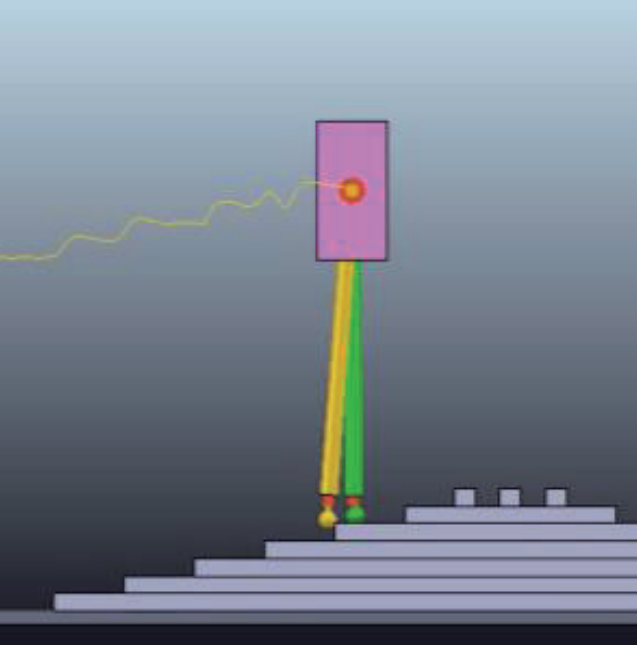
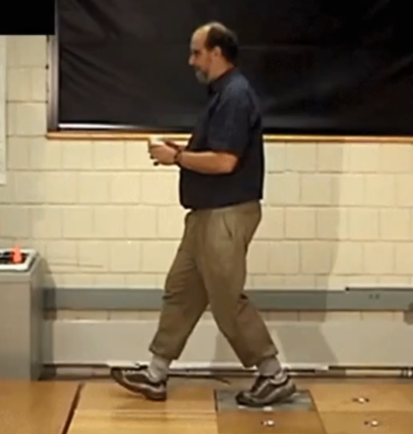
Understand Human Walking through a 2D Inverted Pendulum Model Linqi Ye, Xuechao Chen Humanoids, 2018 [video][PDF] |
 |
Tracking control of an underactuated ship by modified dynamic inversion Linqi Ye, Qun Zong ISA Transactions, 2018 [PDF] |
 |
Control for MIMO Systems with No Relative Degree: Output Redefinition versus Dynamic Extension Linqi Ye, Qun Zong, John L. Crassidis, Bailing Tian ICCA, 2018 [PDF] |
— 2017 —
 |
Control-oriented Modeling and Adaptive Backstepping Control for a Nonminimum Phase Hypersonic Vehicle Linqi Ye, Qun Zong, Bailing Tian, Xiuyun Zhang, Fang Wang ISA Transactions, 2017 [PDF] |
 |
Tracking control of nonminimum phase systems: an overview Linqi Ye, Qun Zong, Bailing Tian, Fang Wang Control Theory & Applications, 2017 [PDF] |
— 2016 —
 |
Tracking Control of a Nonminimum Phase Inverted Pendulum Linqi Ye, Qun Zong, Xiuyun Zhang, Dandan Wang, Qi Dong CISC, 2016 [PDF] |
— 2015 —
 |
Adaptive Control for a Non-minimum Phase Hypersonic Vehicle Model Linqi Ye, Qun Zong, Xiuyun Zhang CCC, 2015 [PDF] |
— 2013 —
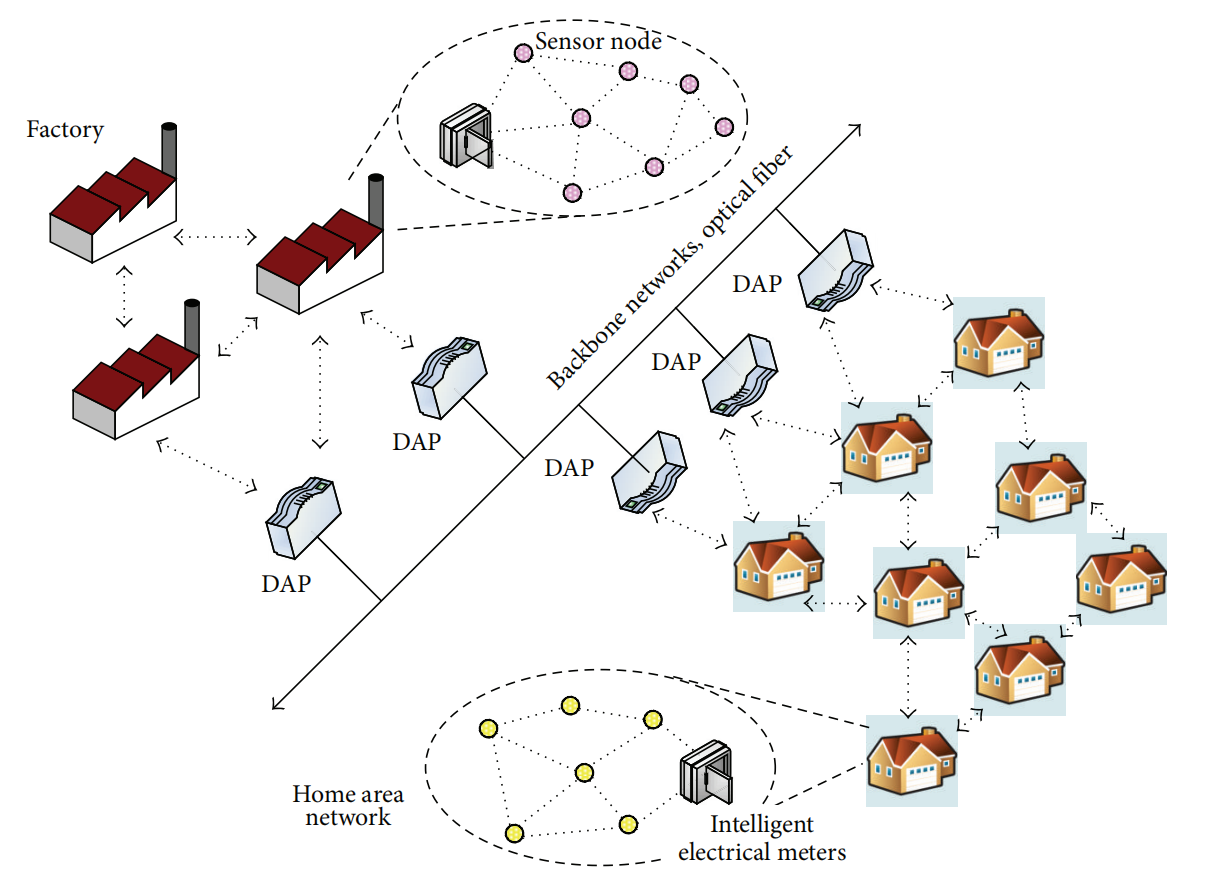 |
A Distributed Agents QoS Routing Algorithm to Transmit Electrical Power Measuring Information in Last Mile Access Wireless Sensor Networks Ting Yang, Wenping Xiang, Linqi Yee International Journal of Distributed Sensor Networks, 2013) [PDF] |